キタガワ製ロボットハンド
株式会社北川鉄工所

チャックメーカーが製作するロボットハンド
北川鉄工所は、長年のチャック製造で蓄積した“つかむ”機能に関する様々なノウハウを詰め込み、産業用ロボットハンドの分野へ挑戦します。
キタガワ製ロボットハンドの特徴は、チャックメーカーならではの高い精度と耐水・耐久性。
切粉対策を強化し、メンテナンス性の向上も実現しました。
北川鉄工所は従来の“つかむ”技術に新たな付加価値を加え、時代に合わせたニーズへの貢献を続けていきます。
キタガワ製ロボットハンド 資料ダウンロード

キタガワ製ロボットハンド 関連動画
キタガワ製ロボットハンド 詳細
特長
搬送と測定を同時に行うスケール内蔵ハンドNPGT_Sシリーズ
測長ハンド(NPGT_Sシリーズ)は、ロボットハンドにスケールを搭載し、つかんだものの長さや径を測る測長機能をもたせたハンドです。 搬送などに用いれば把持部の全数検査が可能となり、今まで人が行っていた検査や仕分け作業を自動で行うことができます。 測定データをパソコンやPLCなどに取り込むことで、トレーサビリティやワーク情報の管理も可能です。 また、記録した測定結果をもとに工程能力の算出も可能で、さらに記録情報を分析し前後工程へ反映することで安定的な品質の確保にも貢献できます。 NPGT_Sシリーズを使ったシステムの構築により、人の作業軽減による省人・省力化を可能にするだけではなく、検査装置やスペースそのものの削減、また品質の安定化などによりトータルコストの削減に貢献します。
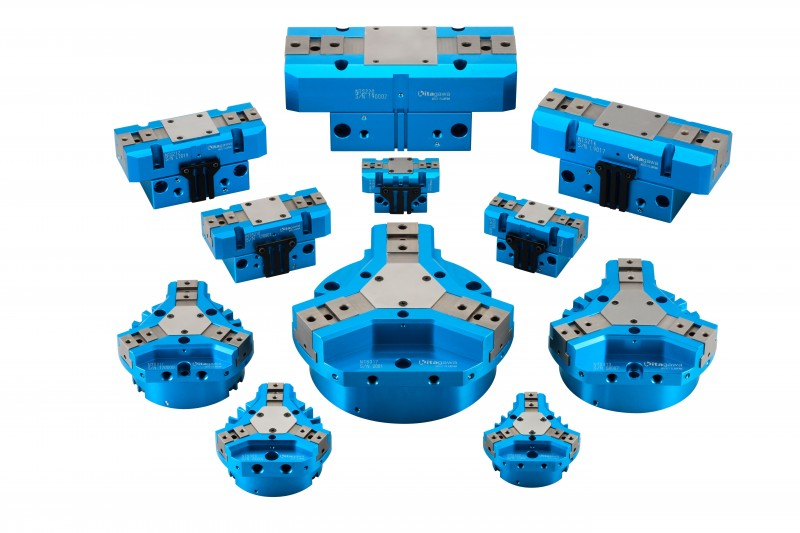
爪の交換もお手の物ジョー交換式NTS-Qシリーズ
クイックジョーチェンジグリッパ(NTS-Q シリーズ)は、ジョーの交換時間を格段に短縮したハンドです。 既存の汎用モデルの標準マスタジョーをクイックマスタジョーと交換するだけでクイックジョーチェンジグリッパに早変わりします。 このため1種類のジョーで複数種の把握面の設定ができ、ジョー兼用性が著しく向上します。

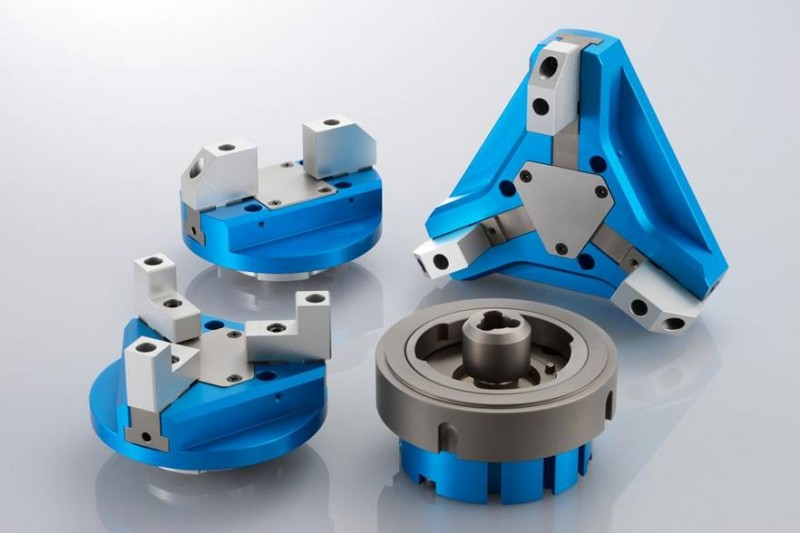
段取り時間を削減面盤交換式QGBシリーズ
クイックプレートチェンジグリッパ(QGB シリーズ)は、上部の面盤を交換することによって円筒状のモノから異形物まで様々なワークを把持することが可能で、新規ワークの立ち上げ時間を短縮できます。 また、ボディー外周にセンサー取り付け溝を6ヶ所備えることで、様々なワークに対するセンサー交換が不要になっています。
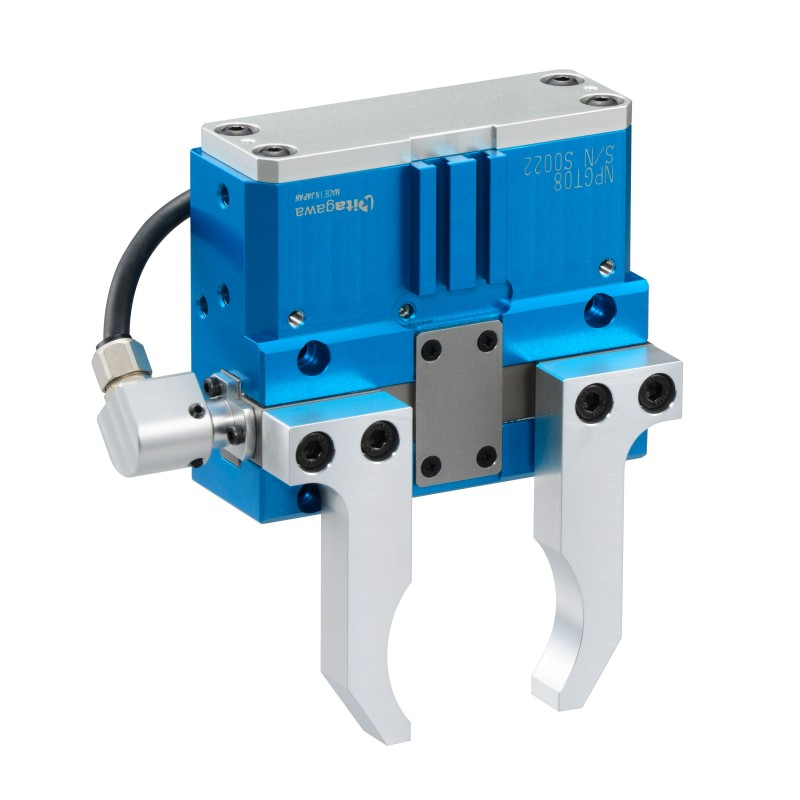
小型ロボにも搭載できるNTSシリーズ
汎用タイプのロボットハンドです。 アルマイト処理による高耐久性に加えてKITAGAWAチャックの技術とノウハウを活かした高精度・高把持力設計で開発しました。 ロボットから降ろさずに、ボディー前側から分解清掃可能な省メンテナンス仕様になっており、徹底的な構造解析と形状・材料を見直し、軽量・コンパクトとなっています。
用途例
| 工程を集約して、リードタイムを削減 |
スケール内蔵ハンド NPGT_Sシリーズをおすすめします。 こちらは「搬送と寸法測定」を同時に行うことができるので、工程圧縮が可能になり、検査場所の削減、検査器具の管理、人権費の削減、人手不足解消などのメリットがあります。 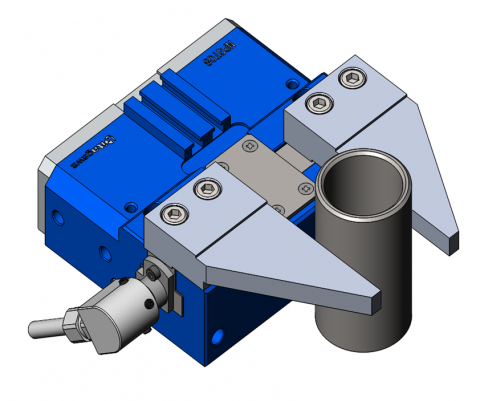 |
|---|---|
| 短時間で多品種のワークを搬送したい |
面盤交換式 QGB シリーズをおすすめします。 上部の面盤を交換するだけで2つ爪を3つ爪に、3つ爪を2つ爪に即座に交換可能です。用途に合わせて面盤を交換していただければ本体や爪を交換する段取りの手間を軽減でき、多種多様なワークを搬送できます。  |
| 段取り時間を削減したい |
爪交換式NTS-Q シリーズをおすすめします。 爪を回転させることで把握可能範囲の中で把握径の異なるワークを把握することが可能です。 また、爪をワンタッチで交換可能なので、段取り替えもスムーズに行えます。  |
| 重たいワークを搬送したい |
汎用タイプNTSシリーズをおすすめします。 弊社のロボットハンドは長年の金属切削に用いられるチャックで培った技術を応用し、コンパクトな本体から大きな把持力を出すことができます。 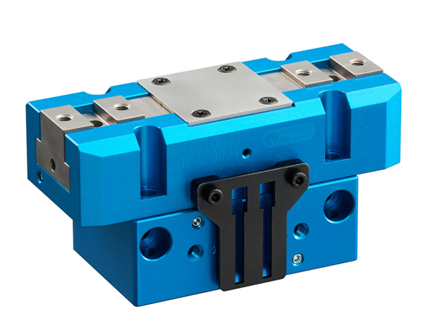 |
| 悪環境でも長く使用したい |
汎用タイプNTSシリーズをおすすめします。 弊社ロボットハンドは耐久性・メンテナンス性に富んだものになっています。我々の得意分野でもある金属切削では切粉やスラッチか飛び交うために、長年培った技術を用いて、ロボットハンドを製作しているため、悪い環境の中でもKITAGAWAロボットハンドを使っていただけます。 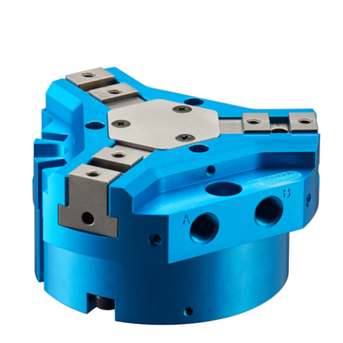 |
よくあるご質問
- 搬送用にロボットハンドの使用を検討中です。選定に関するアドバイスをお願いします。
- 北川鉄工所・ロボットハンドのホームページより把持力計算やグリッパ選定の簡易シュミレーターを掲載していますので、参考までにご利用ください。
- ロボットハンドの図面が欲しい
- ロボットハンドに関する図面はホームぺージに2D図面・3D図面を全型式開示していますのでご覧ください。
- 爪の取り付け方法を教えてほしい。
- ホームページに全型式の取扱説明書を掲載していますので、ご覧ください。
- メンテナンス方法を教えてほしい。
- ホームページに全型式の取扱説明書を掲載していますので、ご覧ください。
キタガワ製ロボットハンド 資料ダウンロード

株式会社北川鉄工所
BE LOCAL, ACT GLOBAL.
創業1918年。
以来、独自の技術力を発揮しながら、日本、世界のものづくりを支えてきました。
さまざまな鋳造製法で素材開発や機械加工に取り組む金属素形材事業、旋盤用チャックやNC円テーブルなどを手がけ、パワーチャックで圧倒的なシェアを占める工作機器事業、ビル建設用タワークレーン、コンクリートプラント、立体駐車場などを生み出す産業機械事業。
これら3つの分野を核にkitagawaは事業を展開しています。
そしてこれからは生産拠点の海外展開や整備にいっそう注力することで、世界レベルでの競争力をさらに高めています。
出展団体情報
| 出展団体名 | 株式会社北川鉄工所 |
|---|---|
| 所在地 | 〒726-8610広島県府中市元町77-1 |
| 設立年月 | 1941年11月 |
| 従業員規模 | 501名以上 |
| URL | https://www.kiw.co.jp/index.html |